Research



Architecting Exploration
Exploration systems can be enormously constrained by limited past design history, but also wide-open to new solutions based on disruptive technologies. Our portfolio of past exploration work comprises launch vehicles, in-space transportation, and surface operations at the Moon, Mars and Near-Earth Asteroids. We use computational tools to first structure the problem-space, then we construct parametric models with which all-up architectures can be evaluated against a host of stakeholder value criteria.
Our current work on architecting exploration is focused on the creation of the MIT / Skoltech International Exploration Strategy University Research Group. Current articles published under this effort are available in publications, such as [Alifanov et al., 2014] and [Capparelli et al., 2014].
In [Aliakbargolkar, 2012] we demonstrated how a field of 192 possible launch vehicles can be transparently reduced to seven possible designs on technical criteria such as aspect ratio, core thrust, and processing facility height, almost all of which are represented by particular viewpoints in the current debate. Further analysis emphasized our holistic approach by evaluating these preferred architectures in terms of the various involved stakeholder preferences coming from executive and legislative branches of government and private industry. Introducing these subsequent screening criteria and also considering the potential for downward derivatives architectures (those that lend themselves to be incrementally development plans) reduces the space to two preferred architectures, one which captured the Space Launch System architecture prior to its announcement.
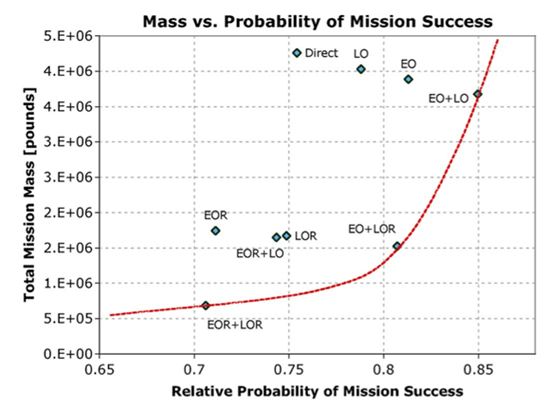
In [Koo et al., 2009], we built a decision-based representation of the in-space transportation architecture for sortie-missions to the moon, representing the mission mode as a series of staging decisions. By systematically enumerating and evaluating the possible architectures, we replicated Houbolt's famous decision to pursue Lunar Orbit Rendezvous during the Apollo campaign. This architecture is represented as a non-dominated solution on the Pareto front of initial mass in low earth orbit (a proxy for development cost) and mission risk, shown in the figure below as EO+LOR.